Oscillations surround us, pervading the universe from the vibrations of subatomic particles to fluctuations at galactic scales. Our hearts beat rhythmically and we are sensitive to the oscillations of light and sound. We are vibrating systems.
An exhibition called Oscillator is running at the Trinity College Science Gallery and this week’s “That’s Maths” column ( TM015 ) gives a taste of what can be seen there.
Fascinating Dynamics
“This simple system looks like a toy at best, but its behaviour is astonishingly complex, with many facets of more than academic lustre.” (Breitenberger and Mueller, 1981)
One of the exhibits is a simple mechanical system with two fundamentally different modes of oscillation that interact in a surprising and intriguing manner.
The Swinging Spring is an elastic pendulum, a heavy mass hanging from a spring suspended at a pivot. The mass is free to swing (and spring) in three dimensions. The system is simple but its dynamics are deliciously complex. It exhibits both regular and chaotic motion.

The Swinging Spring can oscillate vertically, with the elasticity of the spring acting as a restoring force or (quasi-)horizontally like a pendulum, with gravity as the restoring force.
There is an interesting special case when the frequency of the vertical oscillations is twice that of the horizontal oscillations. It occurs when the spring parameters are such that

Here 



This is the case of resonance and in this case energy is transferred back and forth between vertical or springing oscillations and horizontal or swinging oscillations.
Pulsation and Precession
Suppose the system is excited initially in its vertical oscillation mode. Since purely vertical motion is unstable, horizontal motion soon develops. The horizontal oscillations grow to a maximum and then subside again. An alternating cycle of quasi-vertical and quasi-horizontal oscillations recurs indefinitely.
Each horizontal excursion is in a different plane, and the precession of the swing-plane is one of the characteristic and fascinating aspects of the system.
Seen from above, during each horizontal excursion of several oscillations the projected motion is approximately elliptical. Experimentally and numerically one observes that between any two successive horizontal excursions, or pulsations, the orientation of the projected ellipse rotates by the same angle, thereby causing a stepwise precession of the swing plane.
Regular and chaotic motion
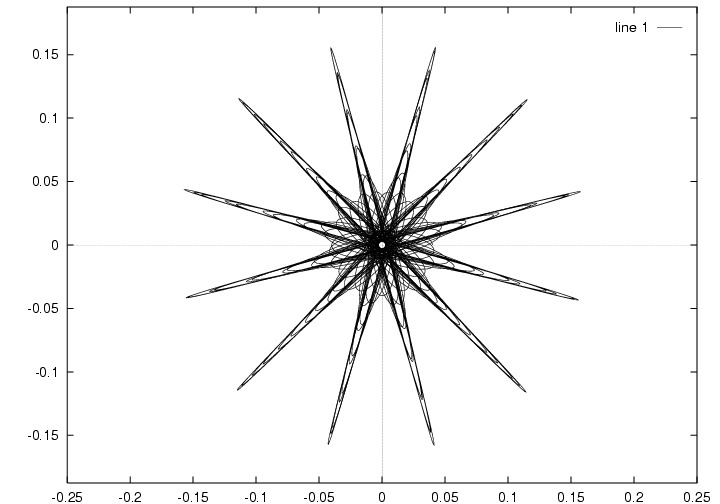
For small amplitudes, the motion is regular and predictable. The figure below shows a case of low-energy motion, in which the bob traces out a regular pattern whose horizontal projection is a twelve-pointed star.
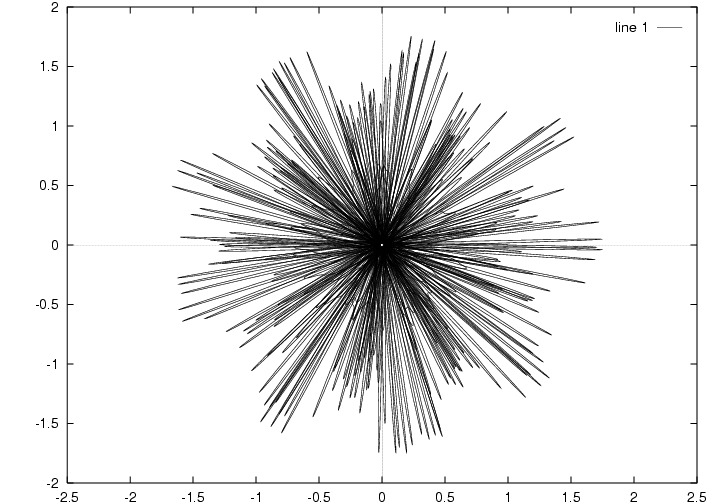
When the amplitude (or energy) is much greater, the character of the motion is different. In this case and the bob no longer traces out a regular pattern, but follows a chaotic and unpredictable trajectory. An example of this is shown below.
The swinging spring provides a model for a wide range of physical systems. The three-wave equations that govern the small amplitude motion of the system also apply to the following contexts:
- Fermi resonance in the CO2 molecule
- Resonant atmospheric Rossby Waves
- Instabilities in the ionosphere
- Laser-matter interactions
- Oscillations in tokamaks
- Phonons in crystals
- Nonlinear optics
A Java Applet has been written to calculate and illustrate animated solutions of the Swinging Spring equations. It is available at this website.
Appendix: Details of the Dynamics
The position of the mass is given by its three spatial co-ordinates 
Let 

The Lagrangian of the system is

where 

with 

where stars denote complex conjugates. These are called the three-wave equations. They occur in a very wide range of physical contexts (some listed above). These equations are integrable: we can work out the formula for an exact solution. They show how the energy moves back and forth periodically between the springing and swinging motion.
For much more details of all this, see some references here.
