In 1985, cosmonaut Vladimir Dzhanibekov commanded a mission to repair the space station Salyut-7. During the operation, he flicked a wing-nut to remove it. As it left the end of the bolt, the nut continued to spin in space, but every few seconds, it turned over through 
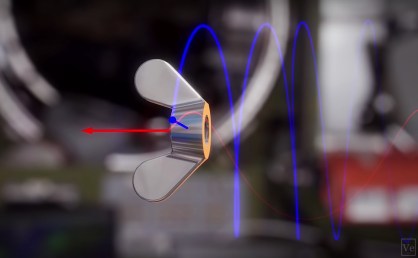
The Dzhanibekov effect is shown clearly in a YouTube video. The video gives an intuitive explanation of the effect, due to UCLA mathematician Terry Tao on MathOverflow in 2011. The phenomenon has been described using several terms:
- The Dzhanibekov Effect
- The Tennis Racket Theorem
- The Intermediate Axis Theorem
According to the video, the effect observed by Dzhanibekov was classified for ten years. Allegedly, there was some concern that the effect could act on the Earth, causing its orientation relative to the Sun to change suddenly and dramatically, with catastrophic consequences.
Tossing a Cell Phone
The behaviour of a freely-rotating rigid body with three distinct principal moments of inertia 



 .
.Stability Analysis
A simple stability analysis shows that rotation about the 



Suppose the body is spinning about the 


so that 

where 


and, since 
Suppose now that the body is spinning about the 



where 



imply exponential growth of 
The simple pendulum
We look at the behaviour of a simple pendulum near the point of unstable equilibrium. This is the point where the bob is highest. It may remain at this top point, but any disturbance, however small, will cause it to move away, and to swing in a full circle.
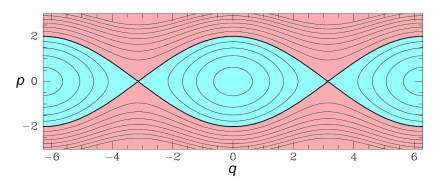
The figure above shows the phase portrait of a simple pendulum. Trajectories in the blue area represent oscillating or librating motion while trajectories in the red area represent rotations. On trajectories near the boundary between blue and red regions, the pendulum bob lingers for a long time near the unstable equilibrium point.
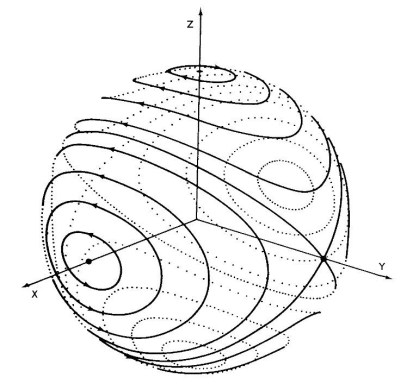
The figure below shows trajectories of the angular momentum vector on a phase sphere for the triaxial rigid body. We see a stable equilibrium point on the 



Conclusion
The intermediate axis theorem has been known since at least the early 1800’s. However, the sudden reversals observed by Dzhanibekov were not noticed. Perhaps this is because, at the earth’s surface, there is only a short time before the body falls to the ground, and the effect is hard to observe. In space, with no forces acting on the body, it can spin undisturbed for a long time — long enough for the effect to become obvious.
The first American satellite, Explorer 1, was launched in January 1958. The satellite, which was long and slender, was spin-stabilized about its long axis, the one with the smallest moment of inertia. However, the satellite had flexible antennae which oscillated, dissipating energy and destabilising the rotation. The satellite toppled out of its stable spinning state, flipped over and began to spin about the axis with the maximum moment of inertia.
The Earth is rotating about the axis with largest moment of inertia and smallest kinetic energy, so no catastrophic overturn is likely any time soon.
Sources

