“A bicycle, certainly, but not the bicycle,” said Holmes.
In Conan-Doyle’s short story The Adventure of the Priory School Sherlock Holmes solved a mystery by deducing the direction of travel of a bicycle. His logic has been minutely examined in many studies, and it seems that in this case his reasoning fell below its normal level of brilliance.
When the path of the back tyre is known
We easily derive equations for the path of the front tyre when the path of the back tyre is known. Denote the position of the point of contact of the front tyre with the ground by 


We assume that the distance between the two points of contact — the wheel-base 

The point 

Knowing the path of the back wheel in the form 
For small 

Now suppose the back wheel follows a sinusoidal track, 
Then the front point of contact is

where 

When the path of the front tyre is known
If the path
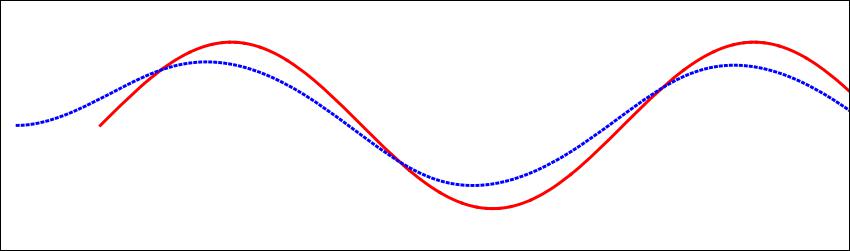
Stan Wagon (2010) gives some Mathematica code to compute the back track from the front one. Using this, the solution when the front point of contact follows a sinusoidal curve (solid red line) is shown in Fig.1. The back wheel (dashed blue line) quickly adjusts to this and asymptotes to a sinusoid with slightly smaller amplitude.
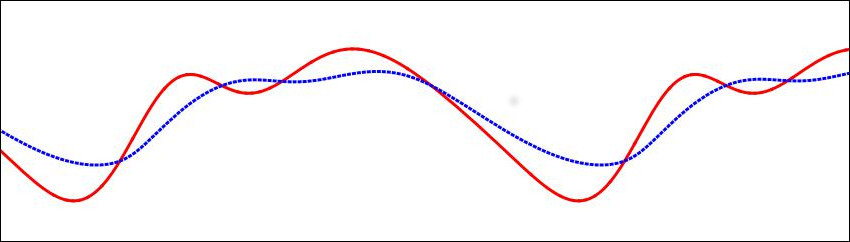
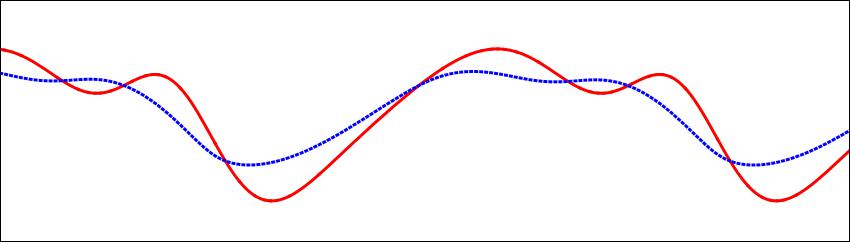
More general cases are shown in Fig. 2. The front wheel now follows a more sinuous curve (solid red line). The path of the back wheel (dashed blue line) is also more complex. Note that the direction of travel can be determined by inspection. The tangent from the blue curve must intersect the red curve at a fixed distance
Linear Track and Closed Loop Tracks
Suppose the front wheel is initially at 


But this is the equation for a tractrix (see Figure at the head of this post), a special curve with equation

or, in parametric form,

Now consider the front wheel at a fixed angle less than
A Challenge
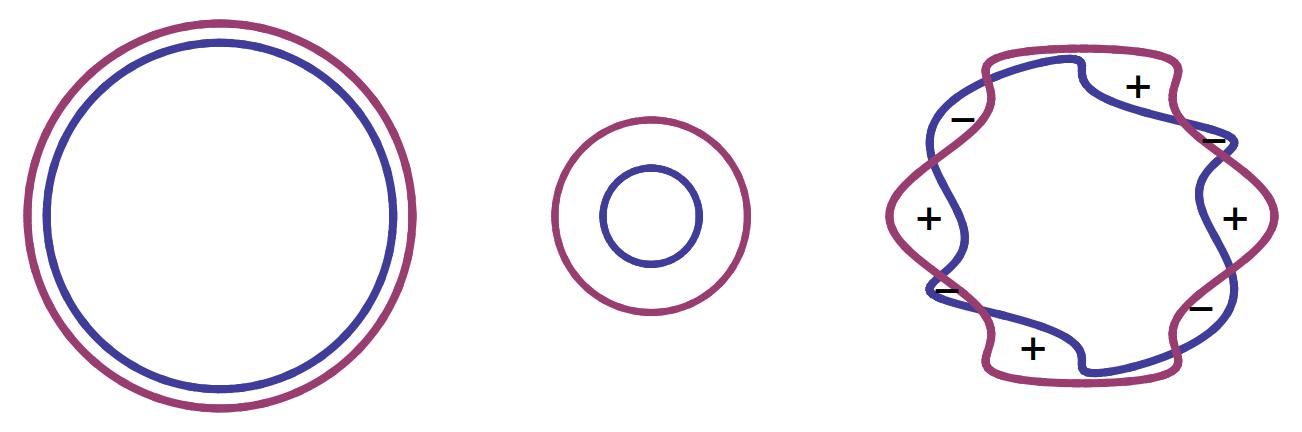
Do the tracks have to be circular for the area between them to remain fixed? Suppose both wheels trace out simple closed curves with winding number 1 (rotating through one anticlockwise turn). An example is shown in Fig. 3, right panel. In general, when the tracks cross, we must count as positive areas where the back wheel is within the front track, and as negative those where it is outside.
The hypothesis is that the nett area is
Meanwhile, back at the Ranch
In The Adventure of the Priory School, Holmes reasoned as follows:
“No, no, my dear Watson. The more deeply sunk impression is, of course, the hind wheel, upon which the weight rests. You perceive several places where it has passed across and obliterated the more shallow mark of the front one. It was undoubtedly heading away from the school.”
Of course, the back wheel will obliterate the front track irrespective of the direction of travel, so this says nothing about which way the bicycle was going. Even Holmes nods.
Answer to Puzzle
In Fig. 2, the bike in the top panel is travelling towards the left, that in the lower panel towards the right.
Sources

